ご提案・オートモーティブ


ご提案のポイント
- 既存ツールでは対応できない特殊車両(例:トレーラー、トラクター等)の自動運転開発
- シミュレーションをフルに活用した高効率開発サイクル
- LabVIEW+CompactRIO(with FPGA)によるプロトタイピング
キーテクノロジー
米Oztech社のリアルタイムシミュレーション基盤、シミュレーションからリアルへのシームレスな移行、各種センサ技術、ECU関連技術
ご提案
工場敷地内で半完成品を搬送するキャリア、燃料をプラントの隅々まで運ぶタンクローリー、広大な農場を効率良く耕すトラクター……世界中で、毎日、敷地の中を、ほぼ決まったルートで走る特殊車両が働いています。
これら「はたらくくるま」を無人で、自動運転させることができれば、仕事の現場はより安全で、より効率的なものとなります。
「自動運転」に関して、様々なアプローチが行なわれ、日進月歩で技術が進歩している昨今ですが、既存のツール/フレームワーク/ソリューションのターゲットは「乗用車」が中心です。特殊車両の自動運転については開発の端緒となる手がかりも見つけづらいのが現状です。
KGCでは、乗用車とは構造もスペックも異なる、産業用の特殊車両の自動運転について、構想段階から製品化までサポートいたします。
特長
- 柔軟で解像度の高い車両モデル
- 乗用車向けツールでは対応できない「特殊車両」への対応
- シミュレータ環境からリアルワールドへのシームレスな移行・逆移入
- 開発フェーズサイクルを高速回転→高品質プロトタイピング
開発フェーズの「洗練へのスパイラル・ループ」
自動運転の開発はいくつかのフェーズに分かれ、螺旋状のループを描きながら洗練を経て、お客様のゴールに至ります。
KGCがお手伝いする自動運転の開発では、洗練されたシミュレーションをリアルワールドへシームレスに移行させる手法で、効率的かつ高速なソリューションをご提供いたします。
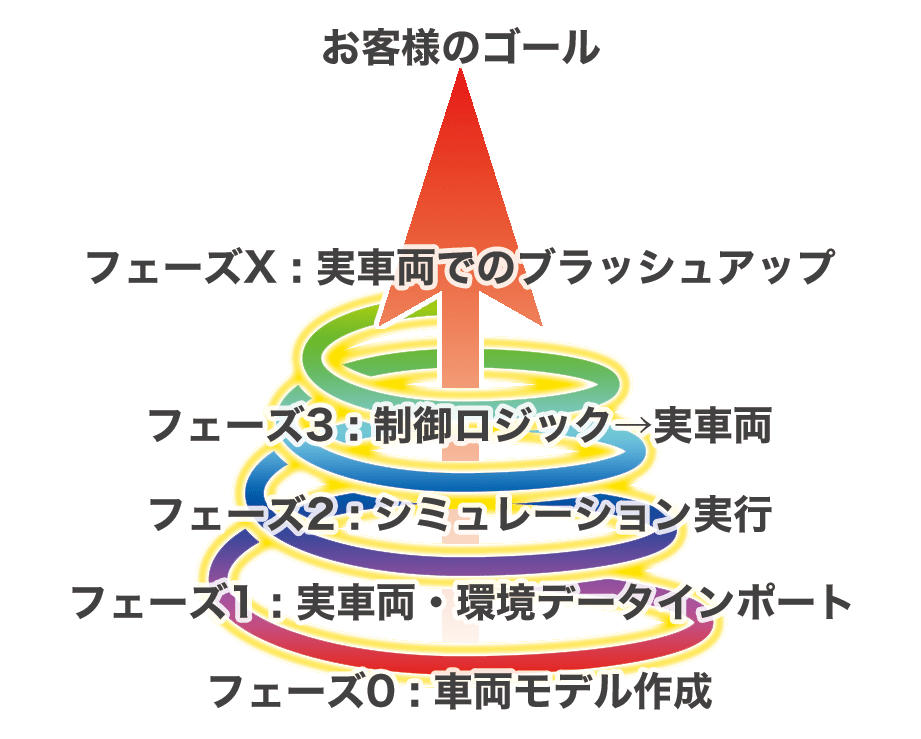
フェーズ0:解像度の高い車両モデル/シミュレータ構築
最初のフェーズは、シミュレーション環境の構築から始まります。
実車両の基本データを元に、シミュレータ内で稼働する車両モデルを構築します。また、想定される走行環境もモデル化し、実車両・実環境をシミュレーションする環境を整えます。
このシミュレーション環境は米Oztech社の技術により構築されます。Oztech社は自動運転に関して長年の経験を持つテックカンパニーであり、柔軟でスピーディな構築が可能です。
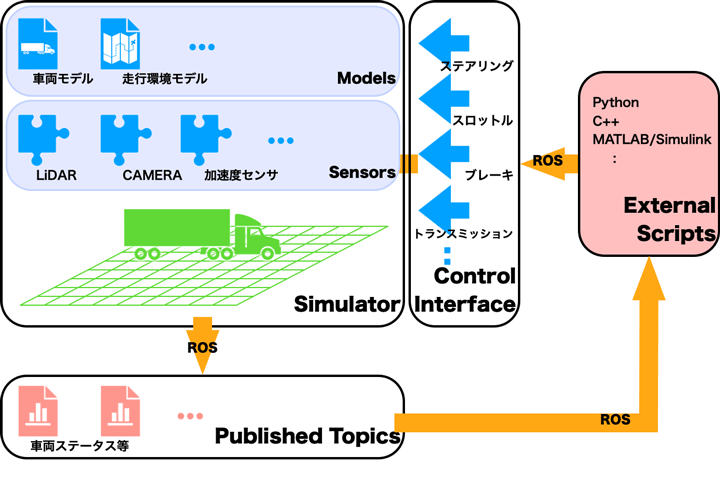
- シミュレータ内で稼働する車両モデルの構築
一般的な乗用車とは異なる、特殊な車両についてモデル化が可能です。たとえば…- 運転席があるキャブ部分と、積荷を載せる車体後部が可動式
- 車体が長大で車輪が多い
- 荷台が昇降したり変形したりする
- 運転席、操縦系が複数ある
- etc.
- 実車両に搭載されているセンサ類、操作系の車両モデルへの組み込み
- カメラ、LiDAR、加速度計等
- スロットルやトランスミッション等
- 走行環境、走行ルートをモデル化し、シミュレーション内に配置
- 上記のような車両モデル、走行環境にあわせて、制御用ロジックを記述
MATLAB/SimuLink、Python、C++等により、制御ロジック(自動運転を行なうための制御用プログラムの基盤)を記述します。 - それらすべてをプラグイン化した3D環境シミュレータをワークステーション上で構成
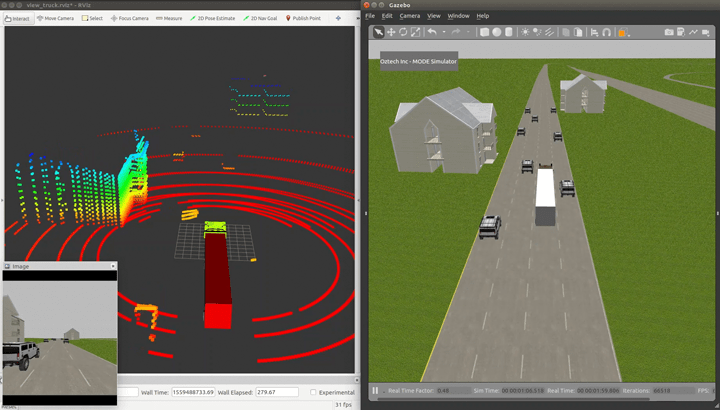
パワフルなCPUとGPUを搭載し、リアルタイムシミュレーションが可能なスペックのワークステーション上に、シミュレータを構築します。
シミュレータを構築する各モジュールはROS(ロボット用メタオペレーティングシステム)を基礎とする柔軟かつ強固な基盤上に構築されています。ここに外部ソフトウェアをリンクすることで、様々なニーズに対応できます。- シミュレーション稼働状態のrviz等による3D映像化
- VeriStand、TestStand、CarSim、CarMaker等のシナリオ入力
- etc.
フェーズ1:現実の車両、環境をシミュレータ環境へインポート
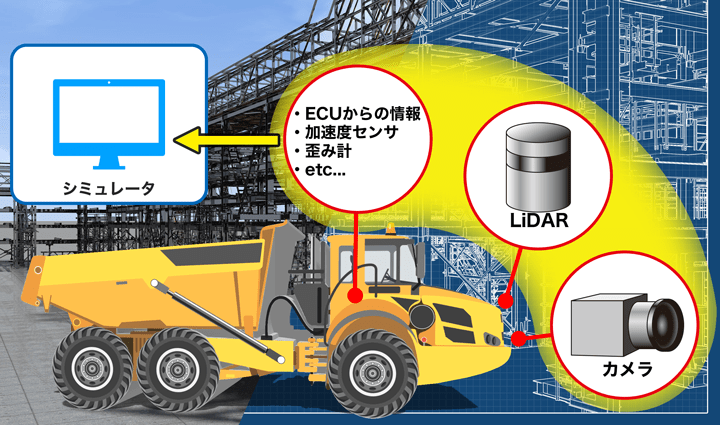
シミュレータが稼働を始めた後、あるいはシミュレータの構築と平行して、実車両の現実世界での様々な挙動を記録し、シミュレータ環境へフィードバックします。
- 実車両によるデータ収集
- 実車両にロギング装置を搭載し、実際に走行させながらECU、センサからの情報を記録
- 特殊車両の場合、長大な車体にひずみが生じたり、接合部前後で挙動が変わるなどするため、各部にセンサを増設するなどしてデータ品質を拡充
- カメラやLiDARにより、実際の走行環境の詳しいデータを取得
- 収集したデータのシミュレータ環境へのインポート
得られたデータを元に、シミュレータ内の車両モデル、走行環境、制御ロジックを精緻なものとします。
実車両と比較しながらこのフェーズを繰り返すことで、シミュレータが現実世界に限りなく近づいてゆきます。
フェーズ2:安全に、高速に、何度でもシミュレーション
次のフェーズでは、現実世界に近づいたシミュレータの中で、自動運転の制御ロジックをブラッシュアップします。
シミュレーションの利点である「安全に、高速に、何度でも」を最大限に活かし、仮想的なテストランと制御ロジックの調整を繰り返します。実車両を走らせるには準備に時間もコストもかかりますが、シミュレーションではそのような障害はありません。
- 実際の車両とは異なり、車両はもちろん、ドライバーやコースの準備も不要
- 実車では危険が伴う条件でもためらうことなく実施可能
- 時間軸も伸縮自在で、シミュレータ内での全ての事象を子細に分析
節目節目で実車両の挙動と比較し、必要に応じて前のフェーズに戻りながら、自動運転の挙動を洗練させてゆきます。
フェーズ3:制御ロジックを実車両へ移植
いよいよ、シミュレータ内でブラッシュアップした制御ロジックを実車両へ移植し、現実世界で稼働させます。
- これまでワークステーション上で稼働していた自動運転基盤を、NI社のCompactRIO上に移植
- シミュレータ内の入出力信号を、すべて実車両の信号入出力と置き換え
CompactRIO内の制御ロジックが、実車のセンサ入力により判断を行い、実車のECUに信号を発して車体をコントロールする状態に。 - 高速処理が必要な場合は、FPGAによる高速演算で対応

CANや車載Ethernet等の自動車関連技術と親和性が高く、ワークステーションと共通の基盤で動作するCompactRIO+LabVIEWを使用することで、自動運転システムのプロトタイプが短期間でご用意できます。
フェーズX:実車両による走行テスト・制御ロジックのブラッシュアップ
これまで洗練してきたシミュレータを経てCompactRIOに搭載されたロジックで、実車両の走行テストを行ないます。
走行テストの結果を踏まえ、必要に応じて前のフェーズに戻りながら、制御ロジックをさらに完成に近づけてゆきます。
お客様のゴール:製品化、そしてその先へ
プロトタイプによって完成レベルまで磨き上げた自動運転システムを、お客様が製品として車両に搭載するフェーズまで、KGCはご支援いたします。
さらに、機械学習の組み込み等、お客様のソリューションの成長に継続的に寄与してまいります。
「シミュレーション→リアル」で効率的な開発を!
既存ツールでは対応困難な特殊車両の自動運転は、KGC+Oztechによるシミュレーションベースで効率の良い開発を。KGCがワンストップでご相談を承ります。
ご質問、ご相談等、どうぞお気軽にご連絡ください。心よりお待ち申し上げます。
関連ページ
※MATLAB、SimuLinkはThe MathWorks, Inc.の登録商標です。
※CarSimはMechanical Simulation Corporationの登録商標です。
※CarMakerはIPG Automotiveの登録商標です。

